

आमतौर पर यह माना जाता है कि यदि बेल्ट कन्वेयर ड्राइव डिवाइस कॉन्फ़िगरेशन बहुत अधिक है, तो यह संसाधनों की बर्बादी है। हालाँकि, बड़े उपकरणों के लिए, यदि यह बहुत कम है, तो इससे बेल्ट चालू होने पर गतिशील तनाव बढ़ जाएगा, और यहां तक कि बेल्ट की प्रतिध्वनि भी हो जाएगी। बेल्ट कन्वेयर के डिज़ाइन में ड्राइविंग डिवाइस का उचित चयन कैसे करें यह महत्वपूर्ण है। यह भी एक महत्वपूर्ण मुद्दा है कि क्या डिज़ाइन उचित है, संचालन सामान्य है, और रखरखाव लागत और रखरखाव की मात्रा कम है। यह आलेख संदर्भ के लिए कई सामान्य ड्राइविंग विधियों के अनुप्रयोगों, फायदे और नुकसान का विश्लेषण करता है।

1. इलेक्ट्रिक रोलर
इलेक्ट्रिक ड्रम को अंतर्निर्मित इलेक्ट्रिक ड्रम और बाहरी इलेक्ट्रिक ड्रम में विभाजित किया गया है। उनके बीच मुख्य अंतर यह है कि अंतर्निर्मित इलेक्ट्रिक ड्रम की मोटर ड्रम के अंदर स्थापित होती है, जबकि बाहरी इलेक्ट्रिक ड्रम की मोटर ड्रम के बाहर स्थापित होती है और ड्रम से मजबूती से जुड़ी होती है।
अंतर्निर्मित इलेक्ट्रिक ड्रम में गर्मी अपव्यय कम होता है क्योंकि मोटर ड्रम के अंदर स्थापित होती है। इसका उपयोग आम तौर पर 30 किलोवाट से कम शक्ति और 150 मीटर से कम लंबाई वाले बेल्ट कन्वेयर पर किया जाता है। क्योंकि मोटर ड्रम के बाहर स्थापित है, बाहरी इलेक्ट्रिक ड्रम में बेहतर गर्मी अपव्यय होता है। इसका उपयोग आम तौर पर 45 किलोवाट से कम शक्ति और 150 मीटर से कम लंबाई वाले बेल्ट कन्वेयर पर किया जाता है।
लाभ: कॉम्पैक्ट संरचना, कम रखरखाव लागत, उच्च विश्वसनीयता, ड्राइविंग डिवाइस और ट्रांसमिशन रोलर एक में एकीकृत हैं।
नुकसान: खराब सॉफ्ट स्टार्ट प्रदर्शन, मोटर चालू होने पर पावर ग्रिड पर बड़ा प्रभाव। विश्वसनीयता वाई-टाइप मोटर + कपलिंग + रेड्यूसर ड्राइव विधि से भी बदतर है।
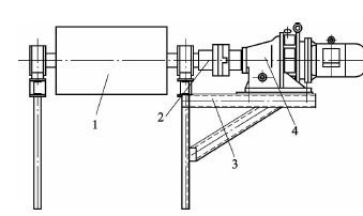
2. वाई-टाइप मोटर + कपलिंग + रिड्यूसर का खराब ड्राइविंग मोड
लाभ: सरल संरचना, छोटा रखरखाव कार्यभार, कम रखरखाव लागत और उच्च विश्वसनीयता।
नुकसान: खराब सॉफ्ट स्टार्ट प्रदर्शन, मोटर चालू होने पर पावर ग्रिड पर बड़ा प्रभाव। आम तौर पर 45 किलोवाट से कम शक्ति और 150 मीटर से कम लंबाई वाले बेल्ट कन्वेयर पर उपयोग किया जाता है।
3. वाई-प्रकार की मोटर + टॉर्क सीमित द्रव युग्मन + रेड्यूसर
यह बेल्ट कन्वेयर पर व्यापक रूप से उपयोग किया जाने वाला ड्राइविंग उपकरण है, जिसका उपयोग आम तौर पर 630 किलोवाट से कम की एकल शक्ति और 1500 मीटर से कम लंबाई वाले बेल्ट कन्वेयर में किया जाता है।
आयत-सीमित द्रव युग्मन को पीछे के सहायक कक्ष के साथ एक आयत-सीमित द्रव युग्मन और पीछे के सहायक कक्ष के बिना एक आयत-सीमित द्रव युग्मन में विभाजित किया गया है। क्योंकि मोटर चालू होने पर पूर्व धीरे-धीरे पीछे के सहायक कक्ष के माध्यम से थ्रॉटल छेद के माध्यम से द्रव युग्मन की कार्यशील गुहा में प्रवेश करता है, इसका प्रारंभिक प्रदर्शन बाद वाले की तुलना में बेहतर होता है।
यदि पीछे के सहायक कक्ष वाले को चुना जाता है, जब द्रव युग्मन के दो मॉडल इसकी संचरण शक्ति को पूरा कर सकते हैं, तो द्रव युग्मन के लंबे शुरुआती समय और बड़ी गर्मी उत्पादन के कारण, बड़े प्रकार के द्रव युग्मन को प्राथमिकता दी जानी चाहिए।
यदि पीछे के सहायक कक्ष के बिना एक का चयन किया जाता है, जब द्रव युग्मन के दो मॉडल इसकी संचरण शक्ति को पूरा कर सकते हैं, तो छोटे प्रकार के द्रव युग्मन को प्राथमिकता दी जानी चाहिए क्योंकि द्रव युग्मन का शुरुआती समय कम होता है और गर्मी उत्पादन छोटा होता है।
कई मोटरों द्वारा संचालित बेल्ट कन्वेयर के लिए, यदि इस ड्राइव विधि का चयन किया जाता है, तो रियर सहायक कक्ष टॉर्क सीमित प्रकार के द्रव युग्मन के साथ द्रव युग्मन चुनने की सिफारिश की जाती है।
लाभ: लागत प्रभावी, सरल और कॉम्पैक्ट संरचना, छोटे रखरखाव कार्यभार, कम रखरखाव लागत, सुरक्षा मोटर अधिभार, जब कई मोटर संचालित होते हैं, तो मोटर शक्ति को संतुलित किया जा सकता है, विलंबित शुरुआत को स्टेशनों में विभाजित किया जा सकता है, और बेल्ट कन्वेयर शुरू होने पर पावर ग्रिड पर प्रभाव कम हो जाता है, विश्वसनीयता अधिक होती है, कीमत कम होती है, और यह 1500 मीटर से कम लंबाई वाले बेल्ट कन्वेयर के लिए पसंदीदा ड्राइविंग मोड है।
नुकसान: सॉफ्ट स्टार्ट प्रदर्शन खराब है, और यह बेल्ट कन्वेयर के लिए उपयुक्त नहीं है जिसका उपयोग डाउनवर्ड ट्रांसपोर्टेशन बेल्ट कन्वेयर के लिए किया जाता है, और बेल्ट कन्वेयर को गति विनियमन फ़ंक्शन की आवश्यकता होती है।
4. वाई-प्रकार मोटर + गति-विनियमन द्रव युग्मन + रेड्यूसर
बड़े बेल्ट कन्वेयर के लिए आमतौर पर उपयोग की जाने वाली ड्राइविंग विधि, जिसका उपयोग आमतौर पर 800 मीटर से अधिक की लंबाई वाले लंबी दूरी के बड़े बेल्ट कन्वेयर पर किया जाता है।
लाभ: संरचना सरल है, अधिभार रखरखाव कार्यभार छोटा है, मोटर बिना किसी लोड के चालू होती है, मोटर अतिभारित होती है, जब कई मोटरें चलती हैं, तो इसे शुरू करने में देरी हो सकती है, शुरू होने पर पावर ग्रिड पर बेल्ट कन्वेयर का प्रभाव कम हो जाता है, विश्वसनीयता अधिक होती है, सॉफ्ट स्टार्ट प्रदर्शन बेहतर होता है, और इसमें स्टार्ट-अप नियंत्रणीय प्रदर्शन होता है, अर्थात, स्टार्ट-अप समय नियंत्रणीय होता है, स्टार्ट-अप गति वक्र नियंत्रणीय होता है, और कीमत कम होती है।
नुकसान: जब द्रव युग्मन शुरू किया जाता है, क्योंकि द्रव युग्मन के कामकाजी गुहा के तेल की मात्रा में परिवर्तन और गति परिवर्तन वक्र गैर-रैखिक होते हैं और पिछड़ापन होता है, नियंत्रणीय गतिशील प्रतिक्रिया धीमी होती है, और बंद-लूप नियंत्रण करना मुश्किल होता है, और कभी-कभी तेल रिसाव होता है। यह डाउनवर्ड कन्वेयर बेल्ट कन्वेयर के लिए उपयुक्त नहीं है, और गति विनियमन फ़ंक्शन के साथ बेल्ट कन्वेयर की आवश्यकता है।

5. वाई-टाइप मोटर + सीएसटी ड्राइव डिवाइस
वाई-टाइप मोटर + सीएसटी ड्राइव डिवाइस को संयुक्त राज्य अमेरिका की डॉज कंपनी द्वारा बेल्ट कन्वेयर के लिए डिज़ाइन किया गया है, मेक्ट्रोनिक्स ड्राइव डिवाइस की उच्च विश्वसनीयता के साथ, आमतौर पर 1000 मीटर से अधिक की लंबाई के साथ लंबी दूरी के बड़े बेल्ट कन्वेयर में उपयोग किया जाता है।
लाभ: अच्छा सॉफ्ट स्टार्ट प्रदर्शन, शुरू करते समय रैखिक और नियंत्रणीय गति वक्र, पार्किंग करते समय गति वक्र नियंत्रित, बंद-लूप नियंत्रण किया जा सकता है, मोटर नो-लोड स्टार्ट, सरल संरचना, छोटा रखरखाव कार्यभार, जब कई मोटरें चलाई जाती हैं, तो इसे चरणों में शुरू करने में देरी हो सकती है, और शुरू करते समय पावर ग्रिड पर बेल्ट कन्वेयर के प्रभाव को कम किया जा सकता है।
नुकसान: रखरखाव श्रमिकों और चिकनाई वाले तेल की उच्च आवश्यकताएं, उच्च उपकरण कीमत। यह डाउनवर्ड कन्वेयर बेल्ट कन्वेयर के लिए उपयुक्त नहीं है, और गति विनियमन फ़ंक्शन के साथ बेल्ट कन्वेयर की आवश्यकता है।
6. वाइंडिंग मोटर + रिड्यूसर
वाइंडिंग मोटर + रिड्यूसर के तीन नियंत्रण मोड हैं:
पहला प्रकार: घाव मोटर स्ट्रिंग आवृत्ति अवरोधक या जल प्रतिरोध;
कोई गति विनियमन फ़ंक्शन नहीं है, और मोटर को बार-बार शुरू नहीं किया जा सकता है, आमतौर पर 500 मीटर से अधिक की लंबाई वाले बेल्ट कन्वेयर में उपयोग किया जाता है और मोटर अक्सर शुरू नहीं होती है।
दूसरा प्रकार: तार-घाव मोटर स्ट्रिंग धातु अवरोधक;
कोई गति विनियमन फ़ंक्शन नहीं है, लेकिन मोटर को बार-बार चालू किया जा सकता है, और थाइरिस्टर पावर के साथ ब्रेक लगाने के बाद, यह डाउनवर्ड बेल्ट कन्वेयर के लिए एक सामान्य ड्राइविंग विधि है।
तीसरा प्रकार: घुमावदार मोटर का कैस्केड गति विनियमन।
इसमें गति विनियमन का कार्य है, इसका उपयोग बंद-लूप नियंत्रण के लिए किया जा सकता है, और आम तौर पर 1000 मीटर से अधिक की लंबी दूरी और गति विनियमन फ़ंक्शन वाले बड़े बेल्ट कन्वेयर में उपयोग किया जाता है।
लाभ: पहली और दूसरी नियंत्रण विधियाँ, सरल संरचना, छोटा रखरखाव कार्यभार, अच्छा सॉफ्ट स्टार्ट प्रदर्शन, कम कीमत, शुरू करते समय पावर ग्रिड पर छोटा प्रभाव, उच्च विश्वसनीयता, अच्छा नियंत्रणीय प्रदर्शन; तीसरे नियंत्रण मोड में उत्कृष्ट पावर ब्रेकिंग प्रदर्शन है।
नुकसान: पहले और दूसरे नियंत्रण मोड में शुरू और बंद होने पर बड़ी ऊर्जा खपत होती है; तीसरी नियंत्रण मोड प्रणाली जटिल है, और इसे वैकल्पिक आवृत्ति या प्रत्यावर्ती आवृत्ति द्वारा प्रतिस्थापित करने की प्रवृत्ति होती है।
7. हाई-स्पीड डीसी मोटर + रिड्यूसर
गति विनियमन फ़ंक्शन के साथ एक ड्राइव मोड, जो आम तौर पर बड़े बेल्ट कन्वेयर में उपयोग किया जाता है जिसके लिए गति विनियमन फ़ंक्शन की आवश्यकता होती है।
लाभ: अच्छा सॉफ्ट स्टार्ट प्रदर्शन, स्टार्टिंग के दौरान रैखिक नियंत्रणीय गति वक्र, पार्किंग के दौरान रैखिक नियंत्रणीय गति वक्र, अच्छा विद्युत ब्रेकिंग प्रदर्शन, चरणहीन गति परिवर्तन, उत्कृष्ट नियंत्रणीय प्रदर्शन, बंद-लूप नियंत्रण, उच्च विश्वसनीयता कर सकते हैं।
नुकसान: कीमत बहुत महंगी है, थाइरिस्टर रेक्टिफायर सिस्टम जटिल है, इलेक्ट्रॉनिक नियंत्रण उपकरण एक बड़े क्षेत्र को कवर करता है, पावर फैक्टर कम है, डीसी मोटर में स्लिप रिंग हैं, ब्रश घिसाव बड़ा है, रखरखाव का कार्यभार बड़ा है, वर्तमान में कोई विस्फोट-प्रूफ प्रकार नहीं है, और इसका उपयोग कोयला खदानों में नहीं किया जा सकता है।

8. कम गति वाली डीसी मोटर सीधे बेल्ट कन्वेयर के ड्राइव रोलर को चलाती है
गति विनियमन फ़ंक्शन के साथ एक ड्राइविंग मोड का उपयोग आम तौर पर एक बड़े बेल्ट कन्वेयर पर किया जाता है जिसके लिए गति विनियमन फ़ंक्शन और 1000 किलोवाट से अधिक की एकल मोटर शक्ति वाले बेल्ट कन्वेयर की आवश्यकता होती है।
लाभ: उत्कृष्ट सॉफ्ट स्टार्ट प्रदर्शन, शुरू करते समय रैखिक नियंत्रणीय गति वक्र, पार्किंग करते समय रैखिक नियंत्रणीय गति वक्र, अच्छा विद्युत ब्रेकिंग प्रदर्शन, चरणहीन गति परिवर्तन, उत्कृष्ट नियंत्रणीय प्रदर्शन, बंद-लूप नियंत्रण, कोई रिड्यूसर नहीं, उच्च विश्वसनीयता।
नुकसान: कीमत बहुत महंगी है, थाइरिस्टर रेक्टिफायर सिस्टम जटिल है, इलेक्ट्रॉनिक नियंत्रण उपकरण एक बड़े क्षेत्र को कवर करता है, पावर फैक्टर कम है, डीसी मोटर में स्लिप रिंग हैं, ब्रश घिसाव बड़ा है, रखरखाव कार्यभार बड़ा है, और वर्तमान उच्च-शक्ति गैर-विस्फोट-प्रूफ प्रकार का उपयोग कोयला खदान में नहीं किया जा सकता है।
9. आवृत्ति रूपांतरण गति विनियमन मोटर + रेड्यूसर
आवृत्ति रूपांतरण गति मोटर + रेड्यूसर के लिए दो नियंत्रण विधियाँ हैं:
पहला प्रकार: प्रतिच्छेदी और प्रत्यावर्ती आवृत्ति रूपांतरण
वैकल्पिक आवृत्ति रूपांतरण प्रणाली का पावर फैक्टर कम है, और स्टार्ट-अप और ऑपरेशन के दौरान बड़ी संख्या में उच्च-क्रम वाले हार्मोनिक्स उत्पन्न होंगे, जिससे पावर ग्रिड में प्रदूषण होगा। मोटर के बार-बार चालू होने से पावर ग्रिड पर बड़ा प्रतिक्रियाशील बिजली प्रभाव भी पड़ेगा, जिसे व्यापक रूप से प्रबंधित किया जाना चाहिए। आवृत्ति रूपांतरण उपकरण में निवेश अपेक्षाकृत कम है।
दूसरा प्रकार: इंटरचेंज एक वैकल्पिक आवृत्ति रूपांतरण रहा है
इस तथ्य के कारण कि वैकल्पिक आवृत्ति रूपांतरण प्रणाली डिवाइस में एक फ़िल्टर इकाई और क्षतिपूर्ति इकाई से सुसज्जित है, पावर फैक्टर 0.9 से अधिक है, उच्च हार्मोनिक घटक बहुत छोटा है, और यह हार्मोनिक प्रदूषण का कारण नहीं बनेगा, और हार्मोनिक अवशोषण और प्रतिक्रियाशील बिजली मुआवजा डिवाइस स्थापित करने की कोई आवश्यकता नहीं है, लेकिन एकल शक्ति 2000 किलोवाट से अधिक है वैकल्पिक आवृत्ति रूपांतरण प्रणाली वर्तमान में चीन में उत्पादित नहीं की जा सकती है, और उपकरण और स्पेयर पार्ट्स को आयात किया जाना चाहिए, जो अपेक्षाकृत अधिक है पहले निवेश में. इसका उपयोग आम तौर पर बड़े बेल्ट कन्वेयर में किया जाता है जिन्हें गति विनियमन कार्यों की आवश्यकता होती है।
लाभ: उत्कृष्ट सॉफ्ट स्टार्ट प्रदर्शन, शुरू करते समय रैखिक नियंत्रणीय गति वक्र, पार्किंग करते समय रैखिक नियंत्रणीय गति वक्र, अच्छा विद्युत ब्रेकिंग प्रदर्शन, चरणहीन गति परिवर्तन, उत्कृष्ट नियंत्रणीय प्रदर्शन, बंद-लूप नियंत्रण, उच्च विश्वसनीयता।
नुकसान: कीमत बहुत महंगी है, इलेक्ट्रॉनिक नियंत्रण उपकरण एक बड़े क्षेत्र को कवर करता है, वर्तमान एकल शक्ति 400 किलोवाट से अधिक गैर-विस्फोट-प्रूफ प्रकार है, जिसका उपयोग कोयला खदानों में नहीं किया जा सकता है।
बेल्ट कन्वेयर के ड्राइव डिवाइस का चयन करते समय, बेल्ट कन्वेयर के विभिन्न ड्राइविंग मोड के फायदे और नुकसान के उपरोक्त विश्लेषण के माध्यम से:
बेल्ट कन्वेयर के लिए जिन्हें गति विनियमन की आवश्यकता नहीं है और बेल्ट कन्वेयर की लंबाई 1500 मीटर से कम है, वाई-प्रकार मोटर + टोक़ सीमित तरल युग्मन + रेड्यूसर इसका पसंदीदा ड्राइविंग मोड है, इसके बाद घुमावदार मोटर + रेड्यूसर (नियंत्रण मोड घुमावदार मोटर स्ट्रिंग धातु प्रतिरोध है);
यदि बेल्ट कन्वेयर की लंबाई 1500 मीटर से अधिक है, तो वाई-टाइप मोटर + सीएसटी ड्राइव डिवाइस पसंदीदा ड्राइविंग विधि है, इसके बाद वाई-टाइप मोटर + स्पीड-रेगुलेटिंग फ्लुइड कपलिंग + रेड्यूसर है।
ऐसे मामले में जब बेल्ट कन्वेयर का ट्रैफ़िक वॉल्यूम बहुत बदल जाता है और गति विनियमन की आवश्यकता होती है, आवृत्ति रूपांतरण गति विनियमन मोटर + रेड्यूसर इसकी पसंदीदा ड्राइविंग विधि है, इसके बाद कैस्केड गति विनियमन + घुमावदार मोटर का रेड्यूसर होता है।












